視覺點膠系統的各個功能說明
作者:點膠機廠家 日期:2019-12-09 09:54 瀏覽:
視覺點膠系統的傳感器能直觀反映物體的外部信息,但單個攝像頭只能獲得物體的二維圖像,立體視覺雖能提供三維信息,但對于外形相同,僅深度有差別的物體難以識別(如有孔物體、階梯狀物等)。且對環境光線有一定的要求具有對光線、物體材料等不敏感,結構簡單,能直接獲取待測點至傳感器的距離等特點,因此在使用視覺點膠機是對作業環境的要求很高,并確定機械手末端執行器的空間位置與姿態,使其能在合適的部位準確點膠工作。
系統原理與結構
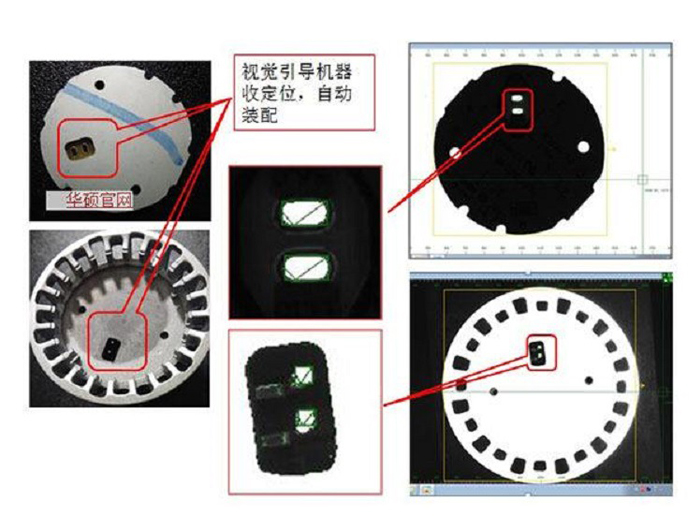
視覺點膠系統由機械手、CCD、視覺傳感器和相應的信號處理單元等構成。CCD安裝在機械手末端執行器上,構成手眼視覺,由CCD獲取待識別和獲取點膠的二維圖像。
圖像處理主要完成對物體外形的準確描述,包括以下幾個步驟:圖像邊緣提取、周線跟蹤。
特征點提取:曲線分割及分段匹配、圖形描述與識別,視覺點膠系統在提取物體圖像邊緣后采用周線跟蹤進行邊緣細化,去除偽邊緣點及噪聲點,并對組成封閉曲線的邊緣點進編碼,記錄每一條鏈碼方向和曲線上各點的X-Y坐標值,便于進一步對物體的幾何特性進行分析。
具有較好的降噪及平滑效果,獲取的物體圖像經視覺點膠系統處理后,可提取對象的某些特征,如物體的形心坐標、面積、曲率、邊緣、角點及短軸方向等。根據這些特征信息,可得到對物體形狀的基本描述,在圖像處理的基礎上,計算機將視覺信息推斷后,進行圖像匹配、識別,并控制機械手以匹配視覺點膠系統所推薦合適的點膠軌跡進行點膠作業。